Project Overview
We were tasked with bringing a 737 display unit back into service. The unit was an XKD Display Solutions assembly fitted with an original Rockwell Collins CRT yoke, but the display itself was driven by interfaced hardware that expected a rasterized image through RGB and composite sync.
The original Rockwell Collins yoke is a notable detail more than a functional dependency; the interesting part of the project was getting the surrounding display system back into service.
The unit arrived as a non-functioning cockpit display, with the front panel dark and the rear showing the original signal and power connections.


Timing and Signal Path
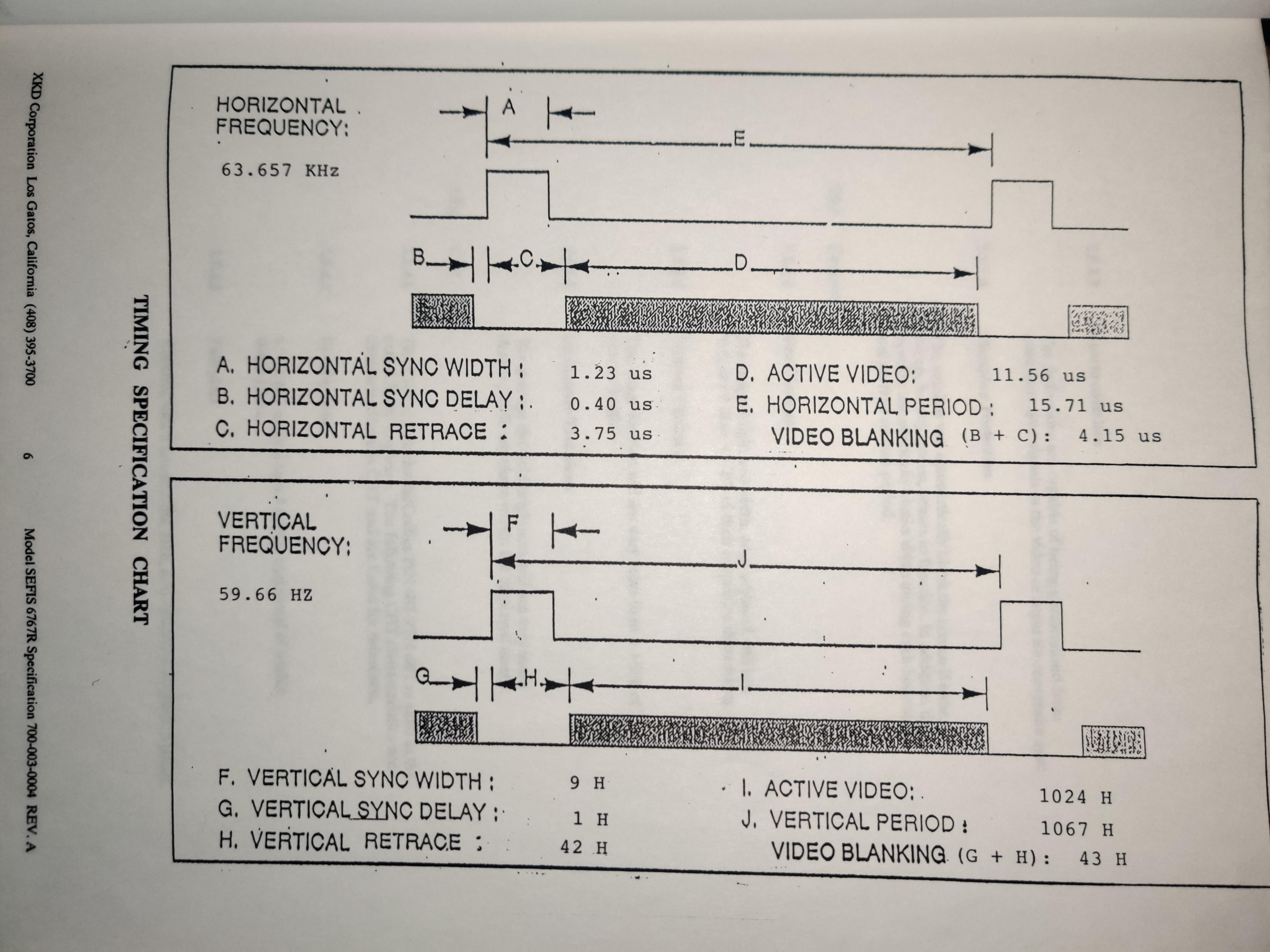
The main challenge was understanding the CRT requirements well enough to recreate a stable analog video output. A timing chart for the vertical and horizontal scan parameters provided the scanning profile needed to generate a valid raster signal.
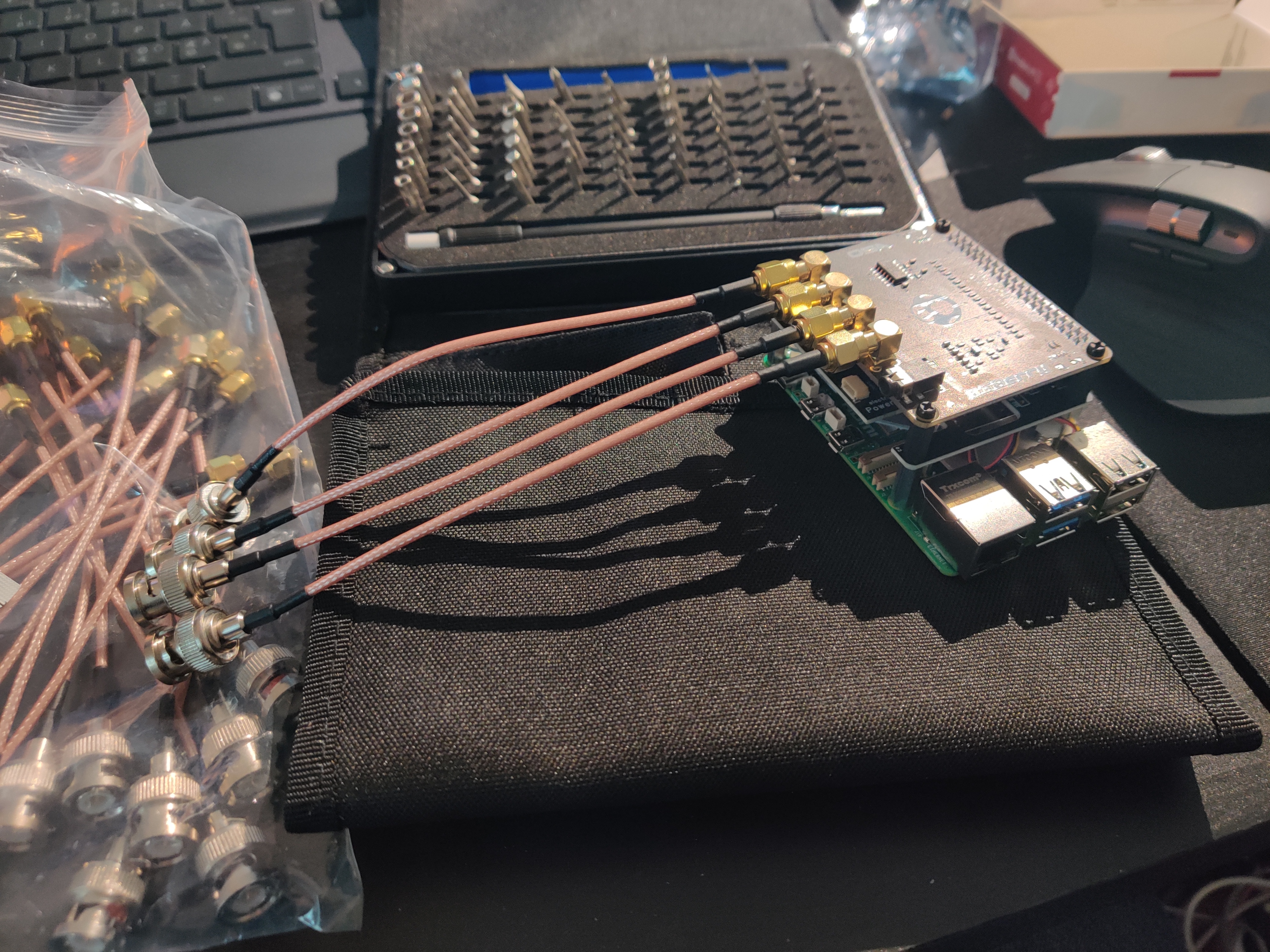
Rather than using custom hardware, the solution was built around a modern Raspberry Pi 5 with 4 GB of RAM for each display unit. Each Pi was fitted with a cooler, a power supply HAT to accept 24V DC, and an RGBerry SMA HAT from OSA Electronics for analog video output.
Software Stack
The Raspberry Pi was configured to generate the required RGB and composite sync signals using the timing data from the chart. On top of that, a kiosk-style Linux image was installed so the unit could boot directly into a dedicated client.
That client listened to X-Plane through a plugin over ethernet, received the simulator state, and rendered the display locally on the Pi before driving the CRT hardware. This keeps the interface unit self-contained while avoiding custom electronics for the rendering pipeline.
Result
The result is a scalable COTS-based solution that only requires 24V DC and an ethernet connection at each interface unit. All simulator data is transferred over the network, while the local Pi handles video generation and analog output.

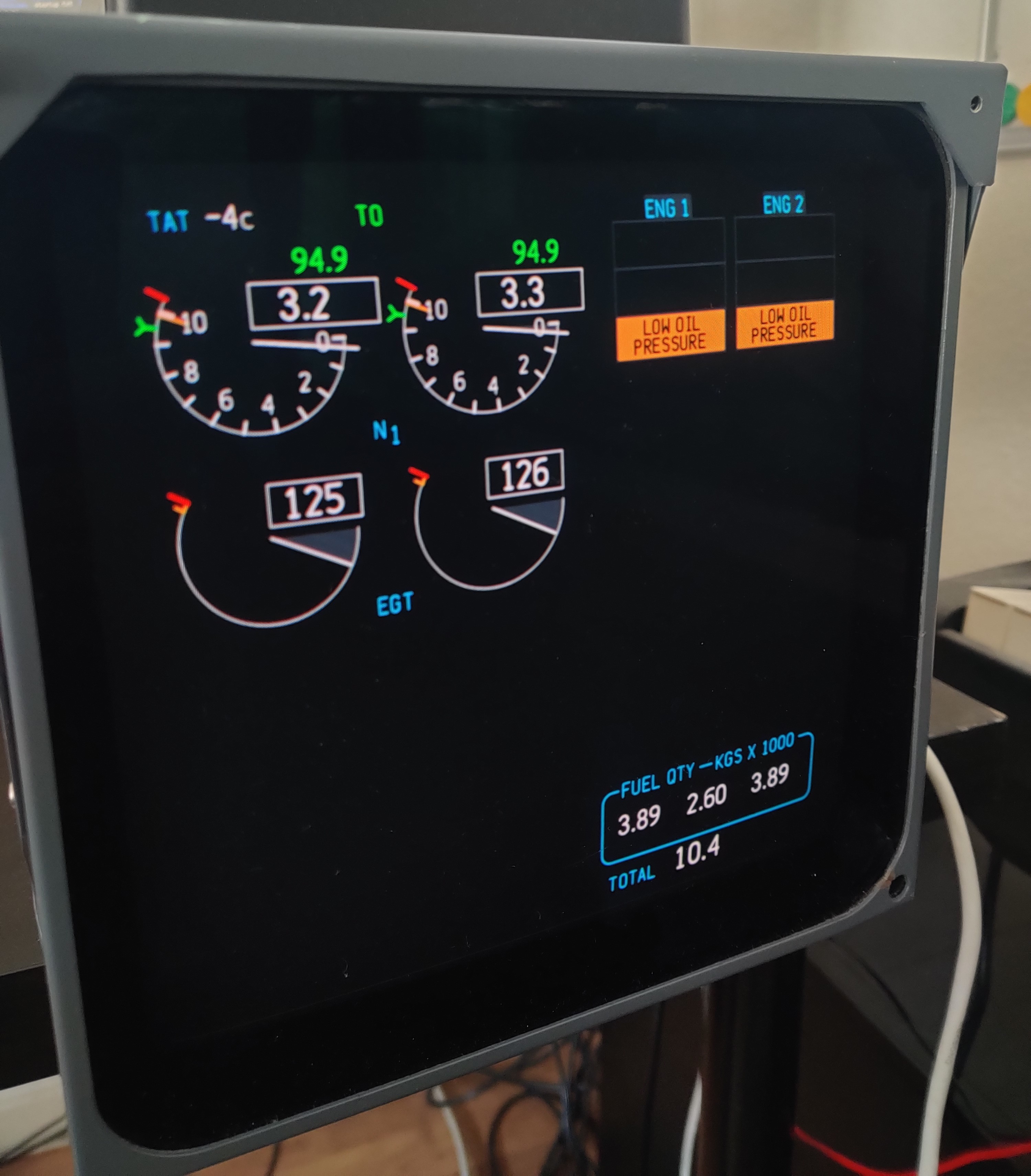
The display has strong contrast and a sharp appearance that ends up looking close to OLED in practice, while still preserving the behavior and character of the original CRT-based unit.